Yipu Zhao
Key Lab of Machine Perception (MOE)
School of Electronics Engineering and Computer Science
Peking University
Email 1: zhaoyp /AT/ cis.pku.edu.cn
Email 2: zhaoyipu /AT/ gmail.com

| |
Yipu ZhaoKey Lab of Machine Perception (MOE) School of Electronics Engineering and Computer Science Peking University Email 1: zhaoyp /AT/ cis.pku.edu.cn Email 2: zhaoyipu /AT/ gmail.com |
|
Education |
| I received my BSE from Department of EECS, Peking University in July 2010. Currently I am a master student at the Lab of 3D Vision Computing and Robotics, Peking University, advised by Prof. Huijing Zhao and Prof. Hongbin Zha. |
Research |
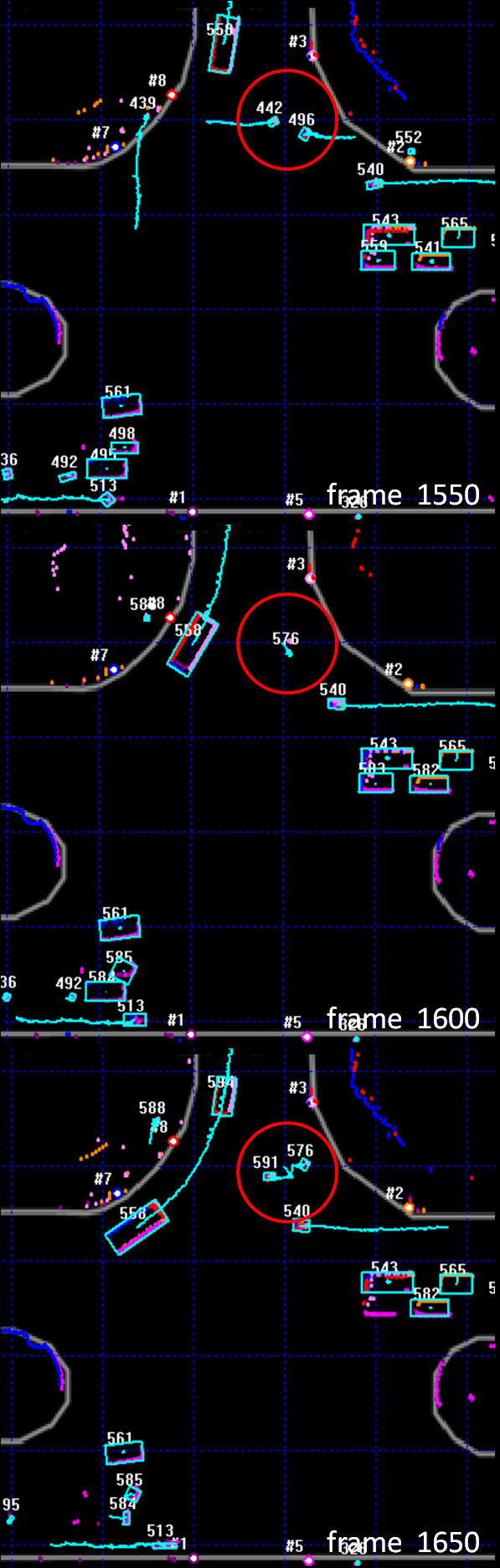
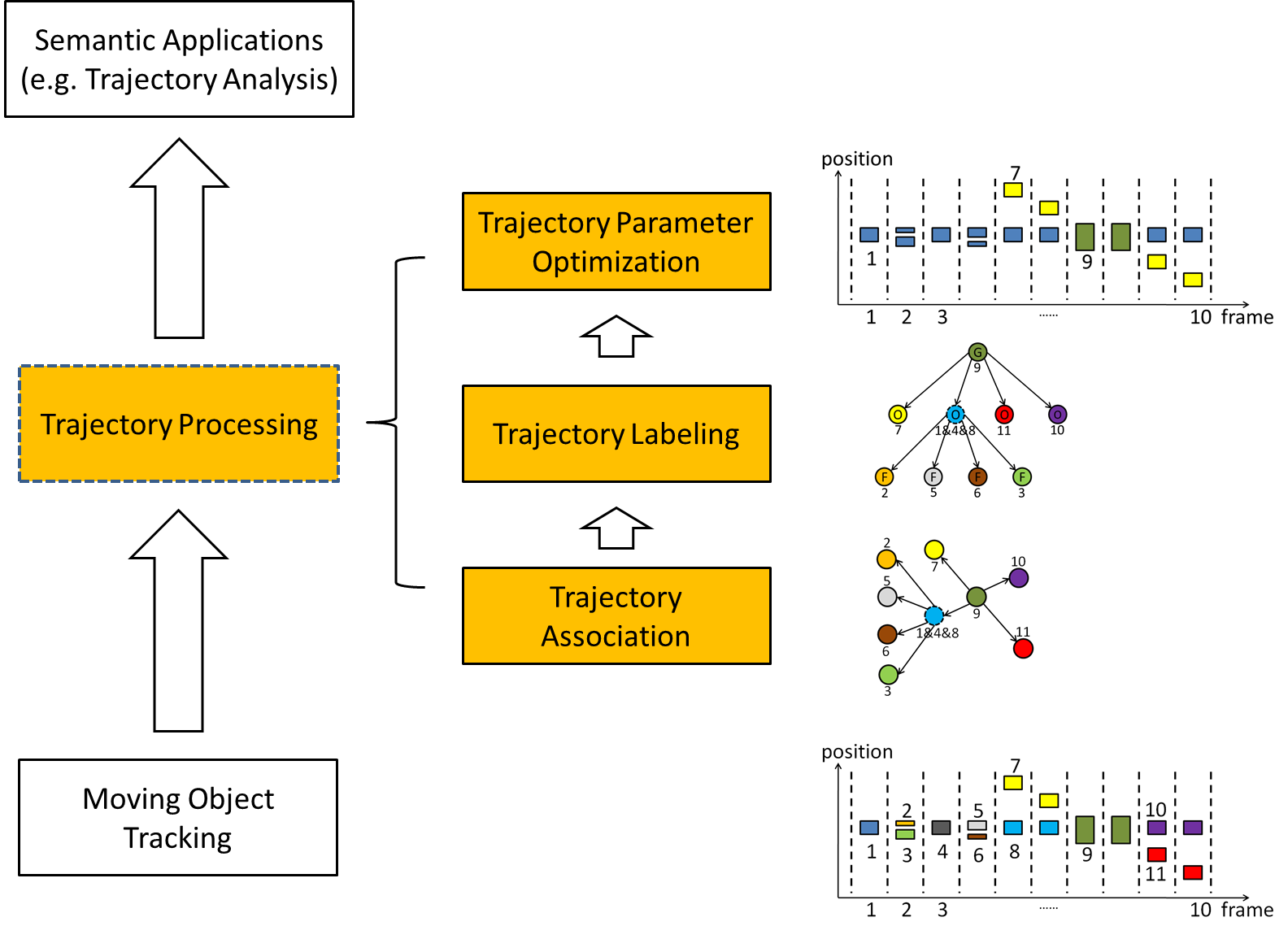
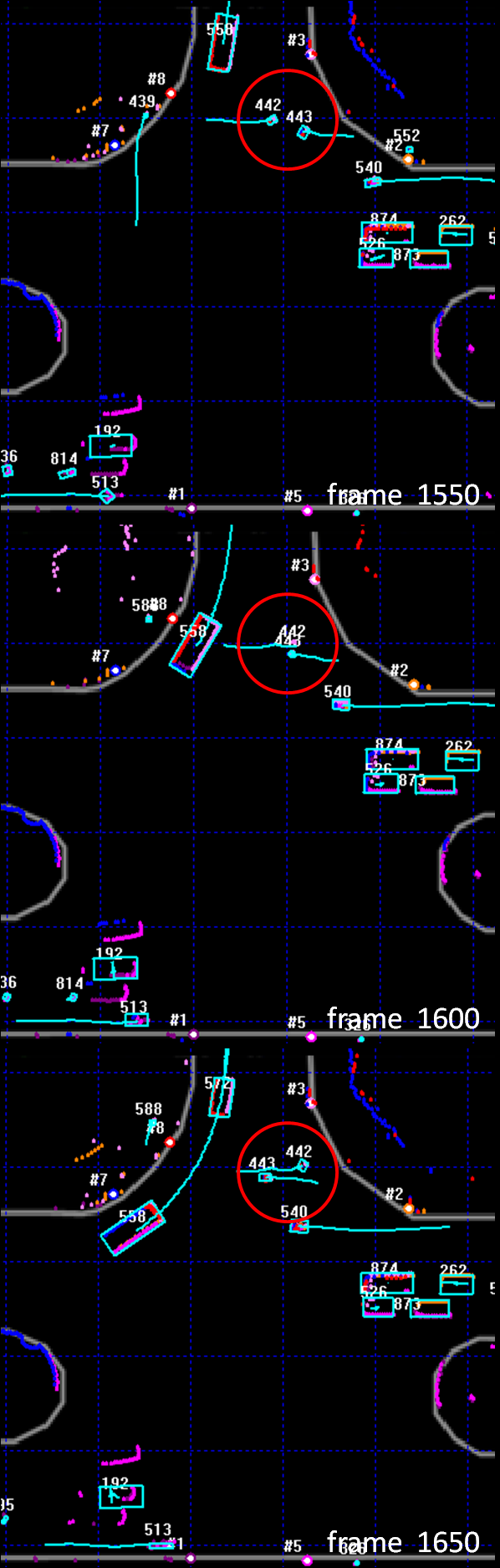
1. Trajectory ProcessingFor applications like trajectory analysis, scene modeling and abnormal detection, trajectories of good quality are required. However, for current moving object tracking systems, split/merge events happen frequently and reduce trajectory quality greatly. Therefore, a trajectory processing method that improves the quality of tracking results is necessary. A demo of our approach could be downloaded here(trajectory processing.avi)
   |
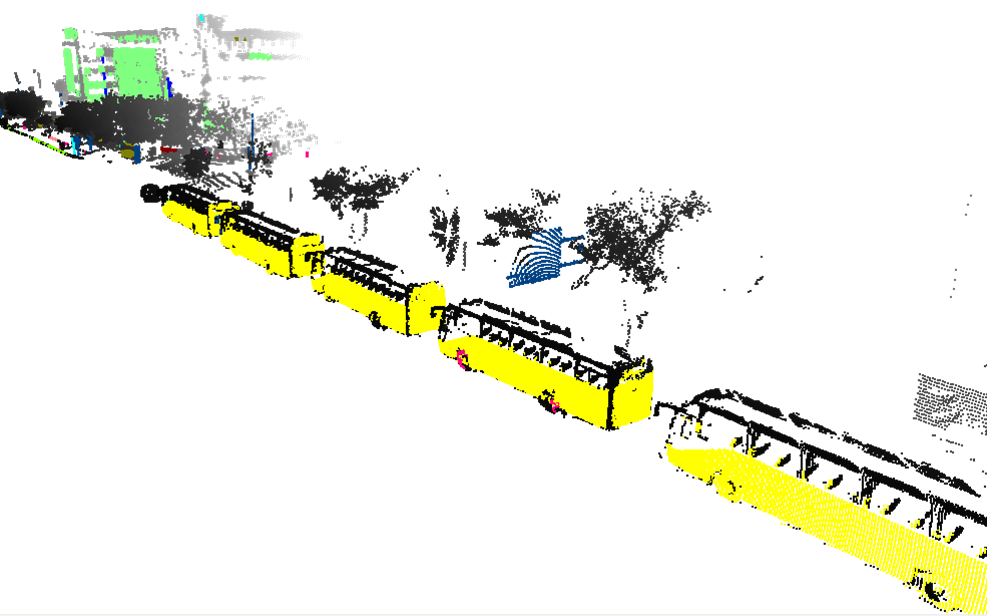
2. 3D Object ExtractionAn object extraction system is developed on our vehicle-borne sensing platform POSS-v. Unlike most similar approaches that follow a bottom-up procedure (Segmentation, Labeling & Merging), our approach focus on a subset of sensing data labeled as "salient". The salient data belong to some pre-defined classes of objects, and are highlighted by a graph matching procedure.
  |
3. Lane Detection & TrackingDemands on real time lane detection & tracking are great for robotics, ADAS and autonomous vehicles. A lane detecion & tracking system is developed and tested on our vehicle platform POSS-v, also a cross-line alerting module is introduced. Some demo videos can be downloaded here(lane detection, lane tracking.avi). We also develop a web-based interface for manualy labeling traffic lanes from video data, using the Bing Mapping SDK. A demo page can be visited, and some sample data can be found at 40.0364N,116.306E. In addition, some demos of POI extraction interface are provided(line label.avi, plane label.avi).
|
Publications |
|
Datasets |
||||||||||||||||||||||||||||||||||||
1. Urban Laser Sensing DatasetThe dataset is collect by a SICK LMS-200 LiDAR mounted on the rightside of the vehicle's roof, with the ground data removed already. It contains a variety of objects appearing frequently in urban scenes. Data files are provided in ascii format: x y z label, one point per line, space as separator. We manually labeled 16 classes of objects (the left parts are undefine), which are listed below. Download here. 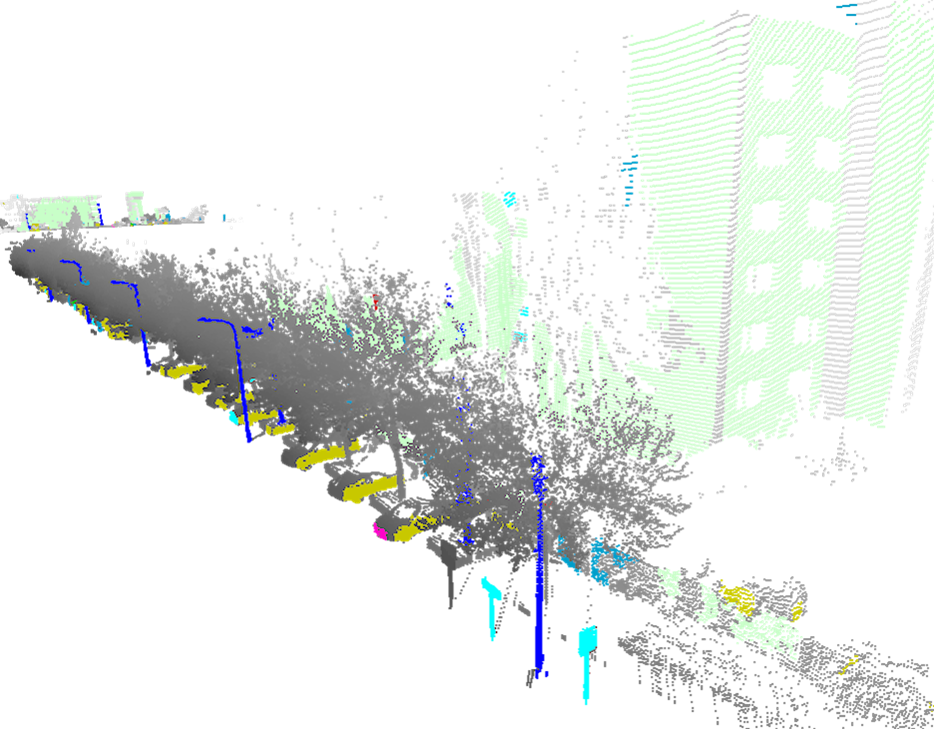
| ||||||||||||||||||||||||||||||||||||
Technical Skills |
|